Análisis principio estructural ha ventaja orekóva umi máquina SMT Fuji cp643e
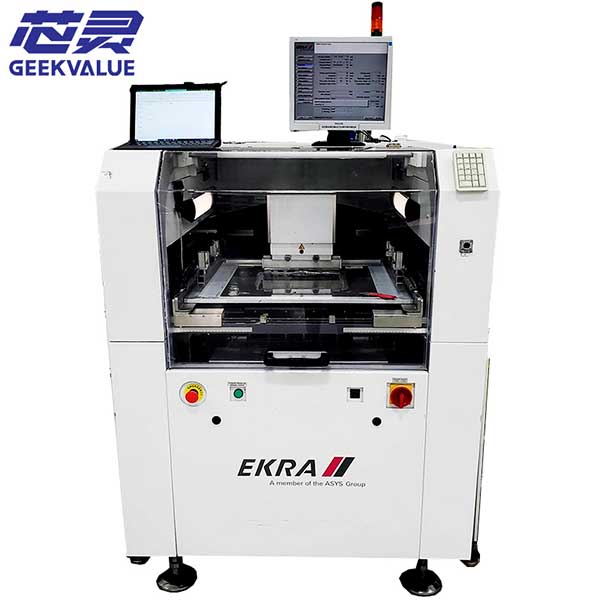
1. Estructura mecánica: Umi máquina Fuji SMT ojejapo jepi umi brazo robótico de alta precisión, iñakã SMT, sistema de alimentación ha cinta transportadora placa de circuito rehegua. Umi brazo robótico ha iñakã giratorio ojeporu oñondive ojehupyty haguã picking pya'e ha colocación precisa umi componente.
2. Sistema de visión: Ombojoaju peteĩ sistema de reconocimiento visual avanzado ojehechakuaa, ojejuhu ha ojehecha hag̃ua calidad umi componente oñemoĩ mboyve ikatu haguãicha peteĩteĩ componente oñemoĩ hekopete pe posición ojedetermina vaꞌekuépe.
3. Sistema de control: Oipuru software ha algoritmo control rehegua ijyvatevéva ocontrola hag̃ua hekopete opaite proceso SMT rehegua, oikehápe ajuste tiempo real-pe umi parámetro clave haꞌeháicha velocidad, presión ha temperatura.
Umi especificación ha’e ko’ãva
CP643 SMT producto modelo: CP 643E
CP643 SMT velocidad: 0,09sec/partes
CP643 SMT precisión: ±0,066mm
CP643 SMT estante: 70+70 estaciones (8mm alimentador) /(643ME: 50+50 estaciones)
CP643 SMT componente rango: 0,6x0,3mm-19x20mm
CP643 SMT fuente de alimentación: 3P/200 ~ 480V/10KVA
CP643 dimensión/peso: 643E: l4.843xw1.734xh1.851mm/6.500kg rupi